
Robot Meccano con Arduino:
Lic. Ademir Bermudez Aguilar
Investigador Tiempo completo y coordinador del Equipo INNOTECH UGB.
Lic. Edwin Osmil Coreas Flores
(Coordinador de Investigación)
La empresa MECCANO con su robot G15, un humanoide para niños y jóvenes.
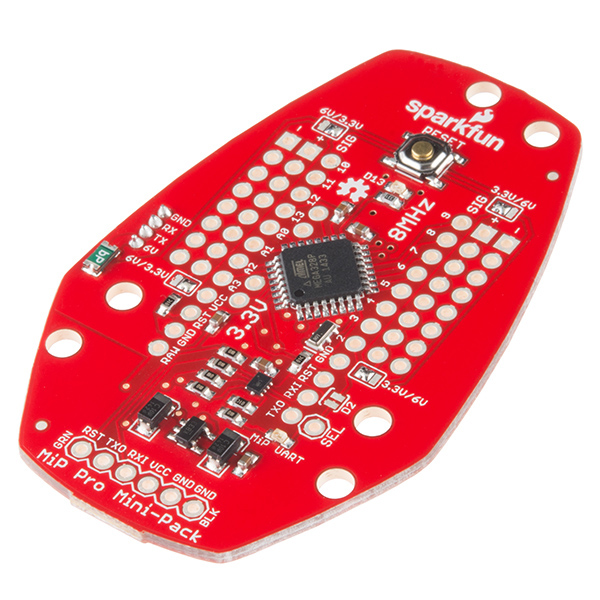
Enlace de Arduino y Meccano
Arduino + MECCANO
Descripción
Cuando construyes un
robot personal Meccanoid G15 ™, estás creando un amigo. Construido por ti
con más de 600 piezas, ¡el G15 es tu mejor amigo de 2 pies de altura! Con sus
sorprendentes capacidades de reconocimiento de voz y más de mil frases
preprogramadas, comentarios y respuestas ingeniosas, ¡puede contar chistes y
jugar!
Más que un juguete, el Meccanoid G15 ™ presenta la nueva innovación de
Meccano en robótica. Meccanoid G15 ™ utiliza tecnología avanzada y 4
servomotores para ofrecer un movimiento realista.
La programación de su Meccanoid G15 ™ es fácil e intuitiva, ¡no se
requieren habilidades especiales! El potente Meccabrain ™ de Meccanoid es
la clave de su programación. Contiene 64 megabits de memoria flash que le
permiten aprender movimientos y grabar sonidos que se reproducen.
Como parte de las metas de aprendizaje, del equipo e introducción a
programaciones mas estructuradas e inicios de programación con IA.
Se reconstruira el robot, con Arduino, y a su vez la programación del robot, con el fin de poder programar al robot sin instrucciones pregrabadas y poder crear tus propias funciones-
Tambien se tiene pensado crear un apk directamente para el robot, se realizaran videos de los avances y proyecto final
Se reconstruira el robot, con Arduino, y a su vez la programación del robot, con el fin de poder programar al robot sin instrucciones pregrabadas y poder crear tus propias funciones-
Tambien se tiene pensado crear un apk directamente para el robot, se realizaran videos de los avances y proyecto final
Equipo de trabajo:
Ademir Bermudez
Aguilar (líder de proyecto)
Diego Alejandro Granillo
Ortez
Ramon Arístides
Quintanilla Murillo